

ʻO ka wili honua honuahe linear motion actuator, hoʻohana nui ʻia i ka hana ʻoihana, aerospace, kaʻa a me nā māla ʻē aʻe. Hoʻopili i nā mea waiwai, ʻenehana, hui a me nā ʻenehana koʻikoʻi a me nā kaʻina hana, nā huahana kiʻekiʻe me nā pale kiʻekiʻe, aia ka localization i kona wā kamaliʻi. Maʻiʻo ʻenehana kinipōpō pōkā ma waena o kawili hoʻoheheʻe, ʻO ka wili honua honua, a me ke ʻano o ka hoʻoheheʻe ʻana o ka honua, he ʻāpana o ka lako hana a me ke kaʻina hana maʻamau, ʻoi aku ka kiʻekiʻe o ka helu localization. I loko o ka robot humanoid, e hoʻohana ʻia nā ʻāpana wili honua e like me nā ʻāpana neʻe nui, e hoʻolauna ana i nā hiʻohiʻona noiʻi hou a me ka noi o ka mākeke, a ua hoʻomaka nā ʻoihana kūloko i ka hoʻomohala ʻana i ka hoʻonui ʻana i ka mākeke a me nā manawa hoʻololi.

Poepoe snā luinahe ʻano o nā ʻāpana hoʻoili e hoʻololi i ka neʻe rotary i ka neʻe laina. ʻO ka bead screw kahi mea hoʻouna maʻamau i hoʻohana ʻia i nā mīkini paahana a me nā mīkini pololei. Hoʻohui ʻia nā ʻōleʻa wili honua i nā neʻe helical a me ka honua a ua ʻike ʻia e ka ukana kiʻekiʻe a me ka pololei kiʻekiʻe. ʻO nā wili wili honua ʻano maʻamau ka mea i hoʻohana nui ʻia, a ʻo ke ʻano hoʻohuli ka mea paʻa loa a noʻonoʻo.
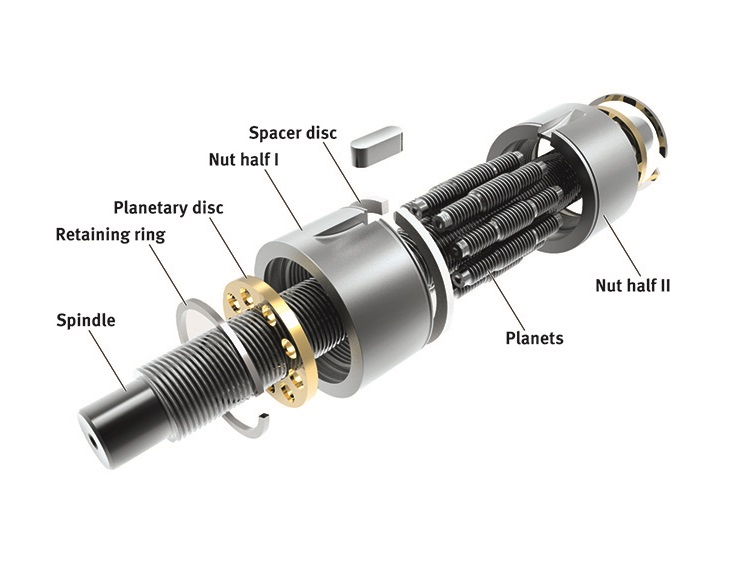
ʻO ka hiki ke neʻe ke kī i ka hoʻomohala ʻana i nā robots humanoid, me nā koi kiʻekiʻe no ka hoʻohana ʻana i ka mana, ka maʻalahi a me ka paʻa. E pili ana i ka hydraulic drive, rack and pinion a me nā polokalamu ʻē aʻe, ʻo ka wili honua honua ke kumu o kalinear actuatorhe hale hoʻokahi, ka nui paʻa, ka mana kiʻekiʻe a me nā pono ʻē aʻe, ʻo ia ka hopena kumu no ka hoʻokele hui ʻana o ka robot humanoid. Me Tesla ma ke ʻano he ʻelele o nā ʻoihana i hui pū me ka noiʻi a me ka hoʻomohala ʻana o ka robota, ua hoʻokomo pū ʻia ka honua roller screw i kahi manawa hoʻomohala hou, inā hoʻouna ʻo Tesla Optimus i 500,000 mau ʻāpana, ʻoi aku ka nui o ka mākeke honua ma mua o 7 biliona.
ʻOihanaCnā hana ʻino oBa pau/ColumnSnā luina:
1. I kēia manawa, he ʻokoʻa ka hoʻohana ʻana i lalo o nā wili pōpō, a ua hoʻohana nā ʻoihana i ka hana maʻalahi e hōʻoia i ka hoʻololi koke ʻana o ka laina hana ma waena o nā pūʻulu o nā huahana like ʻole, a loaʻa i ka hana ke ʻano o ka "puʻu liʻiliʻi, multi-batch".
2.No nā mea kūʻai like ʻole e lawe i nā kūʻai pololei ma ke ʻano he kumu kūʻai kūʻai nui, hoʻohui ʻia e ka hāʻawi ʻana.
3. ʻO ka loaʻa kālā nui a me ka hoʻopukapuka R&D kiʻekiʻe nā ʻano kālā nui o ka ʻoihana.
ʻoihanaOnā manawa kūpono a meRiskTips:
1.Industry trends: planetary screws like precision transmission parts in the machinery industry, is expected to usher in new chances with the development of humanoid robots, i ka manawa like, ka hoʻonui o ka mākeke manawa e hoʻokēʻai i ka piʻi o nā lama home, i ka puka ana a me nā noi kuʻuna e hoʻomaikaʻi i ka helu localization.
2. Nā manawa pāʻoihana: manaʻo ʻia nā ʻoihana kūloko e hoʻolauna i ka hoʻonui ʻana i nā hiʻohiʻona noi huahana, ka ulu ʻana o ka mākeke holoʻokoʻa, a me ka hoʻomohala ʻana i nā manawa hoʻololi home, e hoʻolohe i nā manawa ʻoihana kūpono e like me ka hoʻopukapuka kaulike a me ka aie.
3. ʻŌlelo Aʻo pilikia: ʻoi aku ka liʻiliʻi o ka hoʻomohala ʻana i ka robot humanoid ma mua o ka mea i manaʻo ʻia: ka pilikia o ka hakakā kālepa honua; nā loli kumu kūʻai maka.
Ka manawa hoʻouna: Iune-19-2024




